Description
features:
Working Voltage : DC 5V
Static state Working Current : 5mA
Total Working Current:30mA
Working Frequency:40KHz
Max Range:8m
Min Range :25cm
Measuring Angle :< 50 degree
Working Temperature:-10 to 70C
Trigger Input Signal :10uS TTL pulse
Wiring:
+5V -Power supply positive
Trig-RX
Echo-TX
GND-Power supply negative Application:
Working principle
(1) using IO port TRIG trigger location, to the high level signal of at least 10us;
(2) module automatically sends 8 40KHz pulses, automatically detecting whether a signal return;
(3) a signal return, a high level is output through the IO port ECHO, the time duration of the high level is ultrasonic from launch to return. The test distance = (high level time * speed of sound (340M/S)) /2;
This module uses the simple method, a control port with a 10µs above high level, can wait for high level output at the receiving port. An output can drive the timer, when this port is low can read the timer value, this time for the location of the time, can be calculated distance. So constantly cycle test, that can achieve the measurement of the value for the distance.
Application:
- The horizontal distance;
- Obstacle avoidance, automatic control;
- Object approaching, there is a perceived
- Traffic control;
- Security, industrial control;
- Artificial intelligence, and research
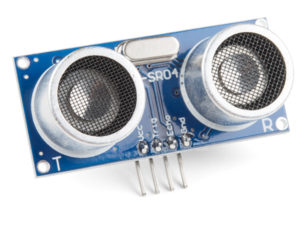
Getting started with the Ultrasonic Ranging Distance Detector Sensor Module Waterproof HC-SR04 M126
There are 4 pins out of the module : VCC , Trig, Echo, GND. So it’s a very easy interface for controller is to use it ranging. The process is: pull the Trig pin to high-level for more than 10us impulse , the module will start ranging ; finish ranging , If you find an object in front , Echo pin will be high level , and based on the different distance,it will take the different duration of high-level. So we can calculate the distance easily :
Distance = ((Duration of high level)*(Sonic :340m/s))/2
Step1: Hardware required
Step2: Connecting the Hardware
Connect the Ultrasonic Ranging Distance Detector sensor module waterproof HC-SR044 to the arduino UNO as shown below,

Step3: CODE
#define echoPin 2 // Echo Pin
#define trigPin 4 // Trigger Pin
#define LEDPin 13 // Onboard LED
int maximumRange = 200; // Maximum range needed
int minimumRange = 0; // Minimum range needed
long duration, distance; // Duration used to calculate distance
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(LEDPin, OUTPUT); // Use LED indicator (if required)
}
void loop() {
/* The following trigPin/echoPin cycle is used to determine the
distance of the nearest object by bouncing soundwaves off of it. */
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
//Calculate the distance (in cm) based on the speed of sound.
distance = duration/58.2;
if (distance >= maximumRange || distance <= minimumRange){
/* Send a negative number to computer and Turn LED ON
to indicate "out of range" */
Serial.println("-1");
digitalWrite(LEDPin, HIGH);
} else {
/* Send the distance to the computer using Serial protocol, and
turn LED OFF to indicate successful reading. */
Serial.println(distance);
digitalWrite(LEDPin, LOW);
}
//Delay 50ms before next reading.
delay(50);
}
Step5: Testing the circuit
open your serial monitor by clicking on the icon in the right top corner(like search icon)